 |
 |
 |

|
PurposeIntegrated Navigation Systems combine GPS and inertial sensors with sophisticated software to yield extremely accurate locational information. Most systems are designed from the ground up, with proprietary hardware and software. The Real Time Navigator (RTN) is a generalized software package that allows you to define your own suite of GPS and inertial sensors without having to write custom software. RTN speeds up system development by allowing you to use off-the-self sensors without costly software engineering. FeaturesRTN is a flexible software package that can be integrated with any GPS and IMU hardware Software separate from the Navigation software provides explicit interfaces to any IMU and any GPS Full Strapdown Inertial Navigation solution at IMU data rate (e.g., 200Hz, WGS-84) Initial heading and leveling alignment accomplished with Kalman Filter Built-in in-air alignment capability (re-start) Navigator and instruments calibrated with Multi-state Kalman filter using GPS observations UTC event imaging to 1 microsec Interfaces with user IMU via RS422 port, including data strobe Interfaces with user GPS via RS232 or RS422 port, including 1PPS data strobe System DescriptionRTN software is written with C++ constructs and a unique Publish/Subscribe Class providing easy inter-process communications with alternative hardware suites Kalman filter tuned to specific user hardware elements QNX or VxWorks operating systems AccuracyPlease contact us for more information
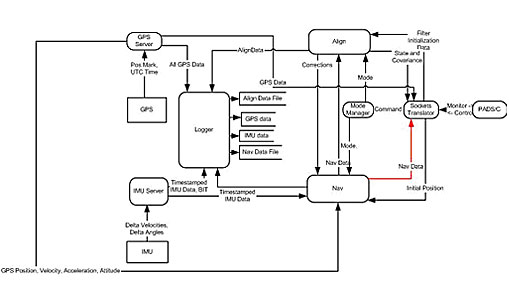
Real Time Navigator Data Flow Diagram |
||||||||



Copyright Applied Analytics, Inc. All rights reserved